
A Caterham Seven Blog
-
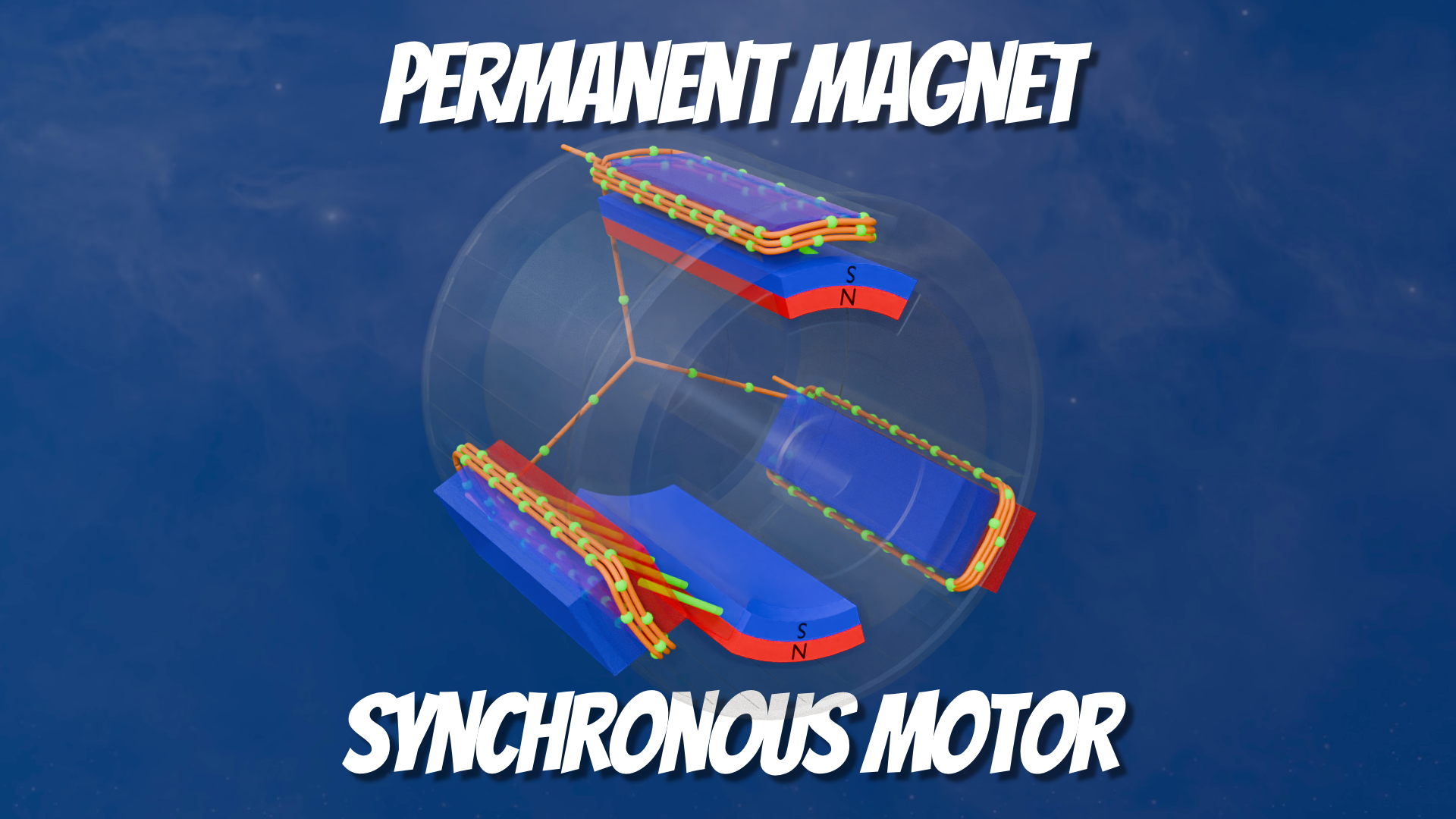
PMSM Motor Internals Video
As part of a larger explainer video I wanted to show how a Permanent Magnet Synchronous Motor Works. I wanted to show how the stator and rotor interacted with their respective magnetic fields and currents. The video shows how a simplified motor is constructed with a Stator and Rotor and then breaks those down to…
-

Finally a good Press-Stud Tool
This one’s as much a note for me so I know what I did to make this finally work. I’ve been looking for a decent way of fitting press-studs for things like boot covers. I’d tried the standard manual tap-and-hope tools that are supplied with the car and with SoftBitsForSevens kits. But that always seemed…
-

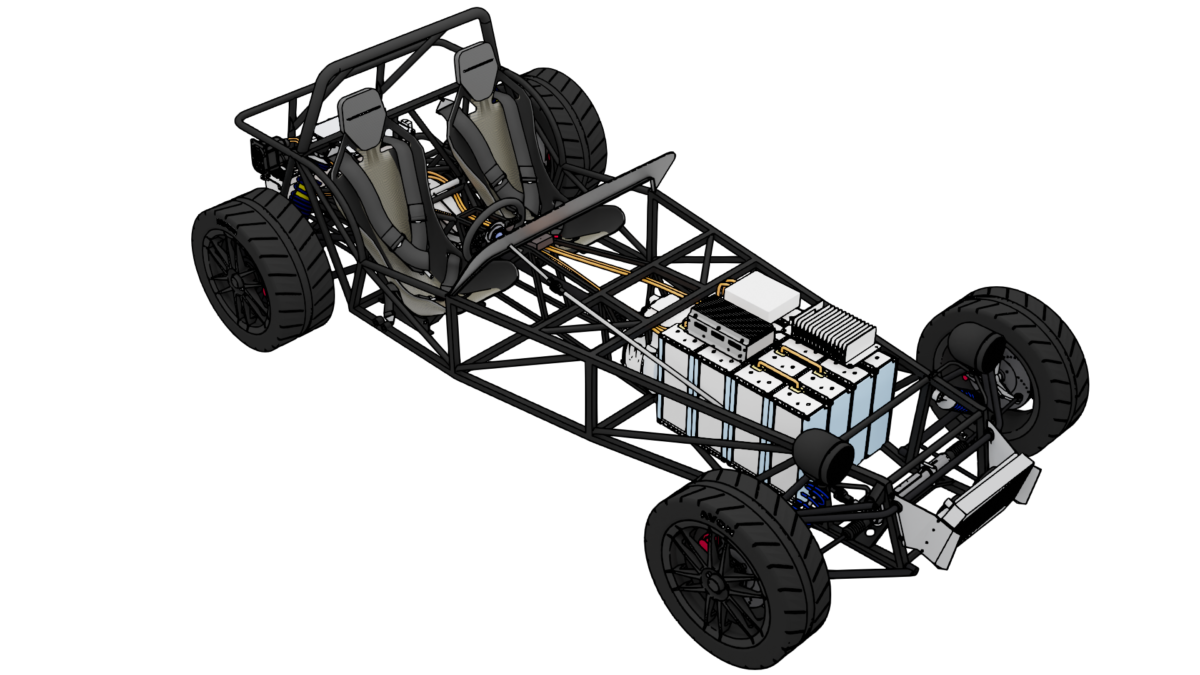
Putting the EV in sEVen – Youtube Project Kick-off
While I’ve been writing articles for the Caterham and Lost Seven Club’s Lowflying magazine, and doing a few Instagram and Facebook posts, I’ve not got around to creating the kick-off video for the Electric Seven Conversion project for Youtube, until now. I’m not really expecting this video to set the world alight, but it’s necessary…
-
Putting the EV in sEVen – Lowflying part 3 : EV Bits and Pieces
This article first appeared in the February edition of the Caterham and Lotus Seven Club’s Lowflying magazine. I also created an animated overview of all of this in this video below: A more detailed version of this video will be coming soon. And here’s the text of the article… Overview In this instalment, we’re going…
-
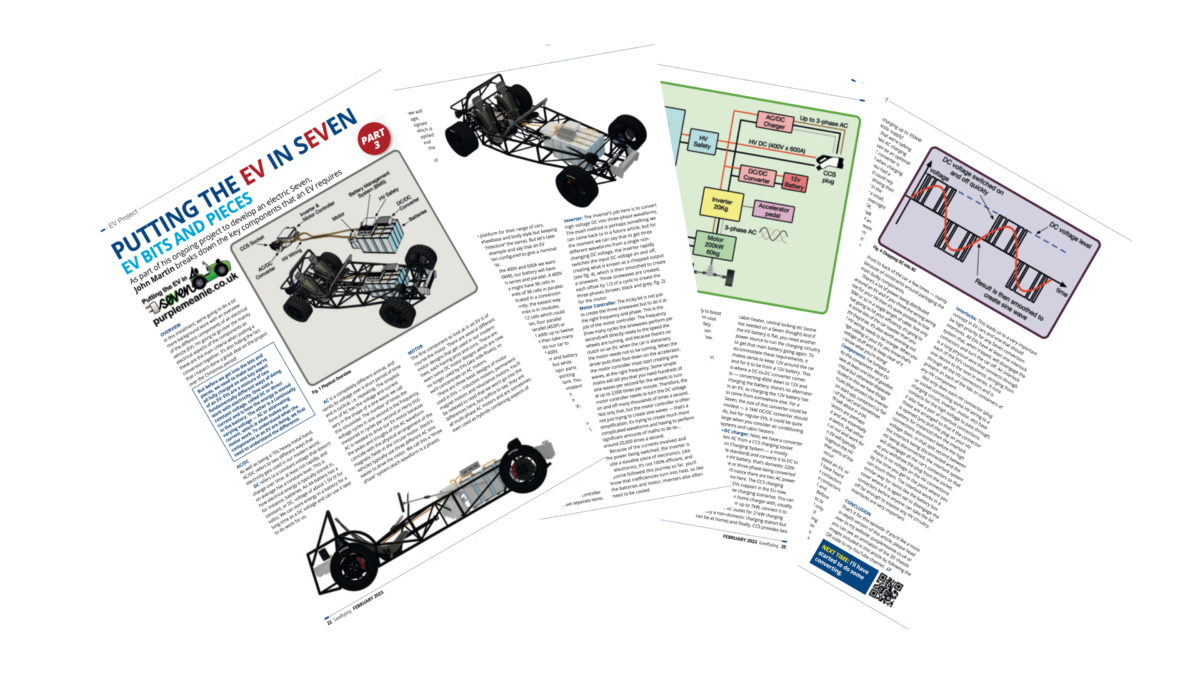
Lowflying February 2023 – Putting the EV in sEVen – EV Bits and Pieces
This is part 3, for the February 2023 issue of Lowflying, of a multi-part series of articles. An extended version of the Lowflying article can be found here.
Got any book recommendations?